El elemento básico para ejercer el control frecuencia-potencia en un sistema eléctrico es el generador síncrono. La figura muestra el esquema básico de un generador síncrono con una turbina, que puede ser de vapor, de gas o de agua. La válvula de admisión a la turbina permite regular el flujo entrante a la misma y, por lo tanto, la potencia mecánica aportada al generador síncrono.
La finalidad de la figura es mostrar las principales variables involucradas en el control de frecuencia-potencia, la estructura detallada del sistema de control se explica en las secciones siguientes. Es frecuente emplear como entrada del sistema de control la velocidad de giro del eje, más fácil de procesar que la frecuencia eléctrica. Otra entrada al sistema es la consigna de potencia, recibida desde el exterior de la planta. La variable sobre la que actúa el control es siempre la válvula de admisión a la turbina.
Otros elementos que pueden estar presentes en un sistema eléctrico y contribuir al flujo de potencia activa son los enlaces de corriente continua, los transformadores desfasadores y los sistemas electrónicos FACTS (Flexible Alternating Current Transmission System). Sin embargo son poco frecuentes, y su influencia sobre el control de frecuencia-potencia en la mayoría de los sistemas es reducida en comparación con los generadores síncronos.

2 - Obtención del modelo
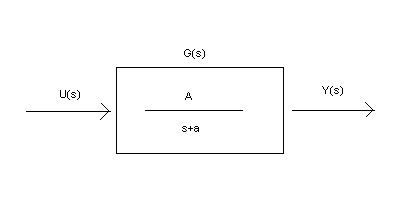
El sistema de control de Potencia activa - Frecuencia (AGC) de un generador trifásico síncrono conectado a un bus infinito se puede representar de manera simplificada tal y como se muestra en las figuras. En ellas se aprecian la función de transferencia del conjunto generador-turbina, la ecuación de oscilación de la máquina, y el regulador.
El control del sistema lo conseguiremos usando es el clásico mecanismo de Watt, que se puede modelar con el parámetro 1/R.A continuación se estimará el efecto de dicho factor de regulación R en el comportamiento dinámico del sistema ayudándonos de las herramientas de Matlab.
El regulador de Watt se trata de un sistema de contrapeso giratorio, acoplado sobre la válvula de admisión de vapor. A medida que aumenta la velocidad, aumenta la «fuerza centrífuga» sobre los contrapesos, haciendo que estos se eleven y cierren la válvula. Al dejar de entrar vapor, la velocidad disminuye y los contrapesos empiezan a bajar, abriendo de nuevo la válvula de admisión. De esta forma, el mecanismo se regula a sí mismo.





Se suponen los siguientes valores de los parámetros:
Tg : Constante de Tiempo del Generador.
R : Estatismo del Generador.


D : Sensibilidad Carga Frecuencia, cuantas unidades varia la frecuencia, por unidad de Potencia Activa.


PL : Tamaño, en pu, del escalón de variación de Carga. ·
Tt : Constante de Tiempo de la Turbina. ·

3 - Resolución con Matlab
- Para R = 1:

- Para R = 5:

- Para R = 10

Conclusiones
- La estabilidad del sistema no se consigue mediante el aumento de la constante K
- Hay que realizar una serie de estudios para poder determinar un valor adecuado
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}